
导读:当前,智能驾驶的开发,是基于功能来展开的,如大家耳熟能详的自适应巡航ACC、交通拥堵辅助TJA、高速领航驾驶辅助NOA等。通常,开发者对于自家的智能驾驶产品,都会有清晰的功能开发规划。这里的开发者,包括造车新势力、传统主机厂、传统Tier 1、科技公司、互联网巨头等等,几乎无一例外。
与此同时,行业内逐渐达成了共识:智能驾驶的测评和体验,需要基于用户场景来展开。用户作为智驾产品的使用者,不可能像开发者一样,去深入而详细地研究各类功能和指标;用户更关心的,是一款产品的使用体验。

1、为便于读者理解,本文沿用了业界惯用的“L3”概念。但必须要澄清的是,在实际落地的过程中,考虑到法规和责任问题,原本按照“L3”的标准设计的高级别智能驾驶一般都只敢作为L2来使用——严格按照SAE及中国工信部的标准看(从责任主体的角度来看),一些车企口中的“L2.5”或“L2.9”仍然是L2;甚至,只要只要车企不敢说“自动驾驶出了事我来担责”,则哪怕其在市场推广中命名为“L3.9”,也仍然只是L2。
2、尽管业界通常认为TJA属于L2,NOA属于L3,但严格地说,这两者之间并没有必然的对应关系,因为TJA、NOA强调的是“应用场景”,说的是“在哪里跑”的问题,自动驾驶等级说的是“出了事谁来担责”的问题。
很多人并没有注意到,欧美及韩国所说的L3,又称为“单车道自动驾驶”,这实际上是“车道保持”,从“单车道”这个场景来说,也就只比通常人们理解的L1强一点吧? 但奔驰说他们家某款车的自动驾驶等级是L3,也没毛病啊,因为他们敢说“出了事我来担责”。
NOA在国内被翻译为“领航辅助驾驶”,这个翻译是值得商榷的。因为,车企一方面希望消费者认为“NOA就是L3”人辅助系统),引诱车主“解放双手”,另一方面,为了避免陷入责任纠纷,又强调这只是“辅助驾驶”,这又回到了SAE标准下的L2。
实际上,日本此前在制定关于L3的法规时也流露出了这样一种心理:——既希望本国的制造商们能抓住这个机会,又不想让他们背负太多压力;既鼓励消费者“大胆尝试”,又害怕他“过分大胆”。
----苏清涛
当前,智能驾驶的开发,是基于功能来展开的,如大家耳熟能详的自适应巡航ACC、交通拥堵辅助TJA、高速领航驾驶辅助NOA等。通常,开发者对于自家的智能驾驶产品,都会有清晰的功能开发规划。这里的开发者,包括造车新势力、传统主机厂、传统Tier 1、科技公司、互联网巨头等等,几乎无一例外。
与此同时,行业内逐渐达成了共识:智能驾驶的测评和体验,需要基于用户场景来展开。用户作为智驾产品的使用者,不可能像开发者一样,去深入而详细地研究各类功能和指标;用户更关心的,是一款产品的使用体验。
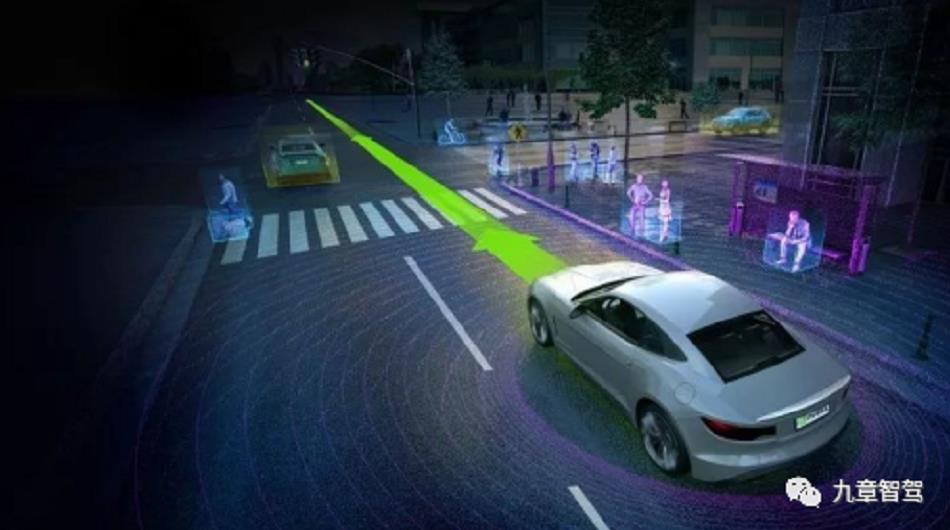
图1 智能驾驶功能与场景图示(图片来源:人工智能在自动驾驶技术中的应用_搜狐汽车_搜狐网 (sohu.com))
我们可以这么理解:功能,属于开发侧的研究内容,形成自己独特的功能规划和功能体系,是开发者需要重点关注的主题;场景,属于用户侧的研究内容,形成系统化和规范化的用户场景体系,是测评机构和用户体验研究需要关注的主题。
那么,当前智能驾驶的通用功能体系是什么?应该如何构建用户场景体系?如何打通功能与场景体系,实现用户体验与功能开发同步?本文将详细解读这些内容。
一、功能体系
在开发过程中,由于高速行驶和低速泊车时研究的对象属性、应用的算法尤其是决策算法都完全不同,因此通常会将智能驾驶的功能,分为行车和泊车两大类功能。
1.1 行车功能
我们汇总了当前主流的行车功能,以及其对应的智能化等级、功能实现效果等内容,如表1所示。其中功能分级参考SAE最新的标准,详见图2。

表1 智能行车功能汇总
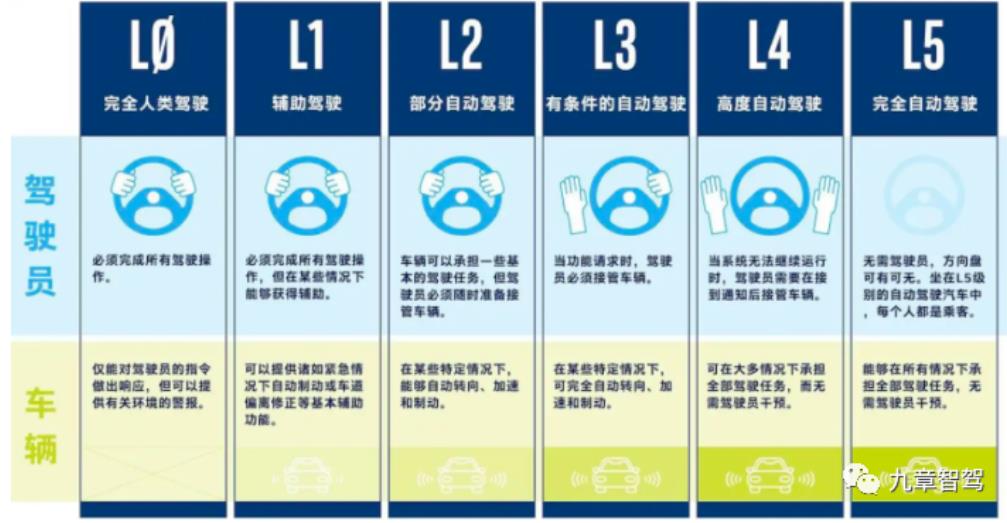
图2 SAE的智能驾驶分级标准
ACC,全称Adaptive Cruise Control,即自适应巡航控制。作为智能驾驶的基本功能,ACC是大家都耳熟能详的一项功能,也已经发展地比较成熟。通过对道路环境和障碍物的感知,自动控制油门和制动系统,实现车辆在本车道内的自动加减速,以及起步、停车等动作,ACC可以帮助驾驶员解放双脚,缓解直线行驶的疲劳。
LCC,全称Lane Centering Control,即车道居中控制。LCC是一项纯横向控制功能,通过对车道线的识别和对转向系统的自动控制,解放驾驶员的双手,让车辆自动保持在本车道内居中行驶。
ALC,全称Auto Lane Change,即自动变道辅助。虽然字面名称叫做“自动变道”,但其实目前主流做法是“指令式变道”,一般是通过转向拨杆,控制车辆的转向系统,实现自动变道。ALC可以有效辅助驾驶员实现变道,解放双手。
TJA,全称Traffic Jam Assistant,即交通拥堵辅助。TJA可以理解为ACC和LCC功能的叠加,属于L2级功能。该功能在堵车时,通过自动控制车辆的启停和加减速,以及微调行驶方向,实现车辆自动保持在本车道居中跟车,或巡航行驶的功能。
NOA,全称Navigate On Autopilot,即领航辅助驾驶。基于导航地图,NOA可以让车辆自动按导航的路径实现点到点行驶,长时间解放驾驶员的手和脚。NOA属于L3级的智能驾驶功能,是低级别智能驾驶功能如ACC、LCC、ALC等的叠加。
按可用区域的不同,NOA主要分为高速领航驾驶辅助和城区领航驾驶辅助。受技术条件的限制,当前已量产的NOA都是高速领航辅助驾驶;造车新势力如特斯拉和蔚小理等,已经在探索城区道路的领航辅助驾驶功能,并且即将量产。
目前,ACC、LCC、TJA等不涉及变道的智能驾驶功能,基本上已经普及,各家几乎都推出了相关的功能。ALC功能由于涉及到变道,对硬件和算法有更高的要求,目前只有部分玩家实现了量产。NOA功能是目前已经量产的最高级别的别智能驾驶行车功能,目前仅有头部造车新势力和头部科技公司实现了高速区域的领航驾驶辅助,城区领航辅助驾驶是下一步的趋势。
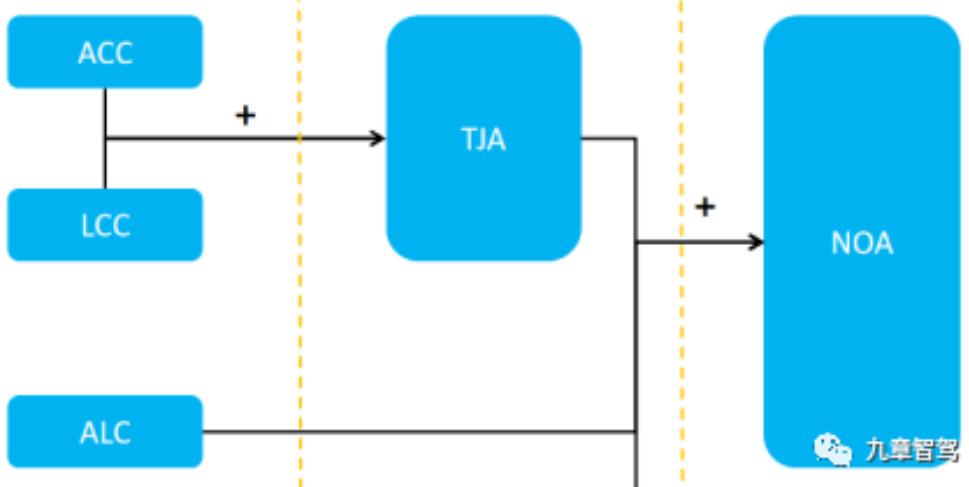
图3 智能行车功能的关系图
1.2 泊车功能
表2汇总了当前主流的泊车功能,以及其对应的智能化等级、功能实现效果等。

表2 智能泊车功能汇总
APA,全称Auto Parking Assist,即自动泊车辅助功能。功能开启后,APA识别出车辆周围可用的车位,并且在驾驶员选定车位后,控制车辆的横纵向运动,实现自动泊入和泊出车位。APA功能需要保持驾驶员在车上,随时接管。目前APA功能已经发展成熟,日渐成为车辆的标准化配置。
RPA,全称Remote Parking Assist,即遥控泊车辅助。驾驶员下车后,通过手机APP等遥控方式,控制车辆自动泊入和泊出车位。
SS,全称Smart Summon,即智能召唤功能。智能召唤功能最早由特斯拉推出,可以让车主在车外通过手机APP的方式,发出召唤指令,从而控制车辆自动行驶,到达指定的位置。
HPA,全称Home-zone Parking Assist,即记忆泊车功能。通过系统自学习,记住车辆在特定区域(家庭或公司停车场)的特定车位,以及行驶轨迹,HPA可以控制车辆从停车场入口开始,自动完成寻找车位和泊车的所有动作。目前小鹏已经实现了量产的HPA功能,由于可用区域限定在停车场内,且需要驾驶员在车上随时接管,因此HPA属于L3级的智能驾驶。
AVP,全称Automated Valet Parking,即自主代客泊车。AVP是真正意义上的全自动驾驶,车辆可以自行进入完全陌生的停车场,不需要先行学习,就能完成所有的泊车动作,并且不需要驾驶员在车上。作为L4级别的智能驾驶,目前对软硬件,尤其是算法和安全性要求很高,目前还没有量产的产品。
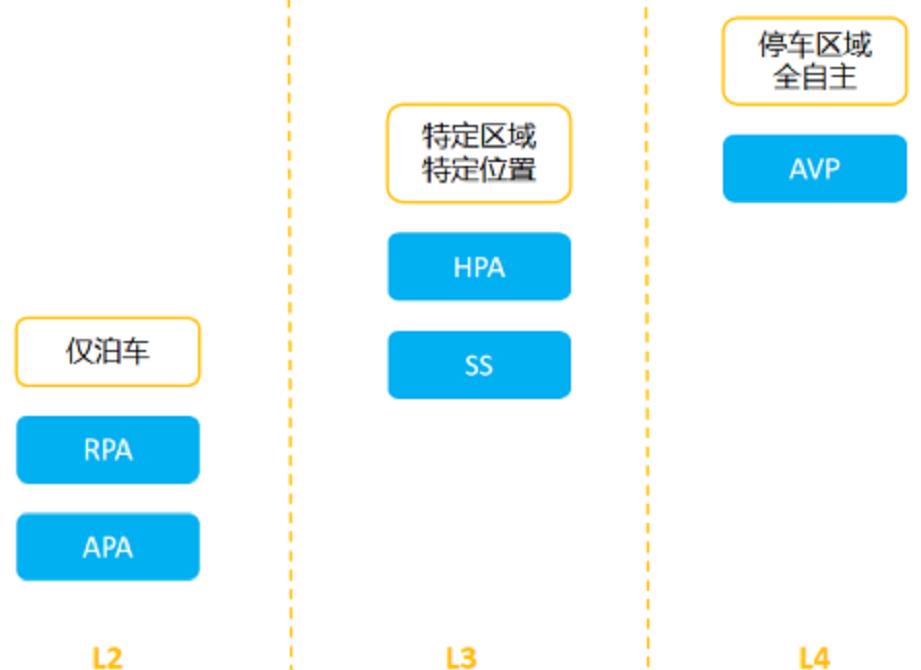
图4 智能泊车功能关系图
1.3 安全功能
除了智能行车和泊车两大类功能外,智能驾驶还包含基本的主动安全功能,如表3所示。
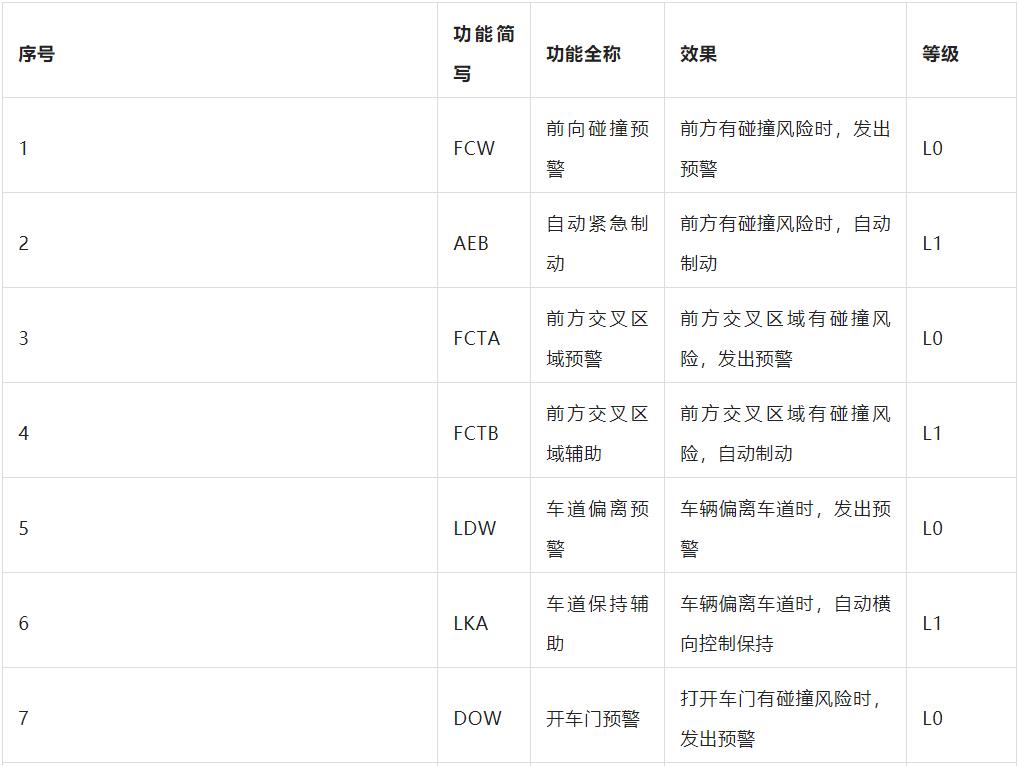

表3 主动安全功能汇总
从表3可以看出,各类主动安全功能与危险源相对自车的位置强相关,而与场景没有直接依赖关系,因此不作为本文的研究重点。另外,安全类功能也已经发展地比较成熟,逐渐成为法规要求的必须项,本文也不再一一展开。
二、场景体系
从完全的用户体验角度,常见的出行场景包括高速、城区和停车场三大区域,其中高速和城区都属于行车场景,而停车场则属于泊车场景。
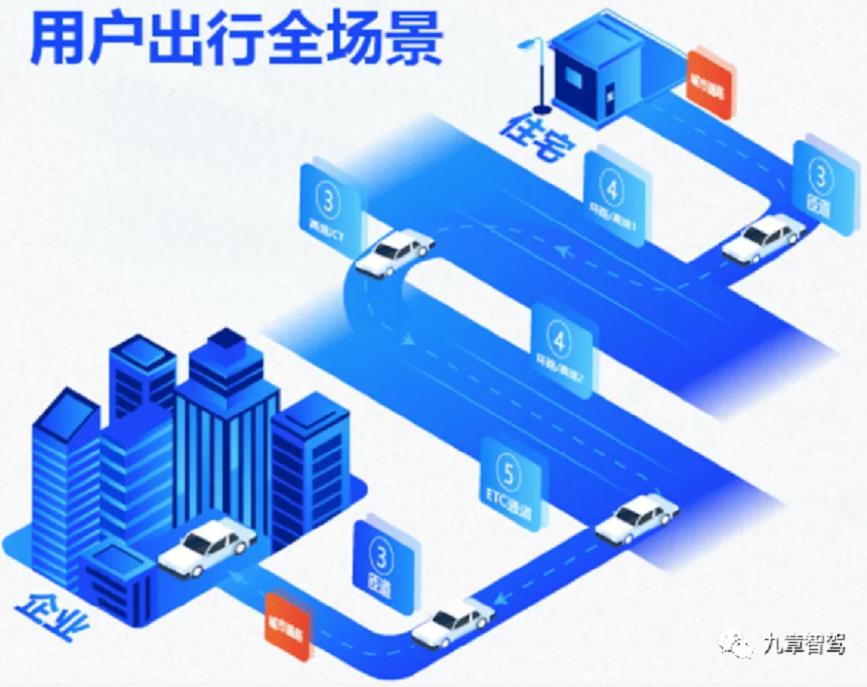
图5 点到点出行全场景示意图(图片来源:阿拉善英雄会自动驾驶“人机大战” 毫末智行展露冠军相_搜狐汽车_搜狐网 (sohu.com))
2.1行车场景
在道路上行驶的场景称为行车场景。从智能驾驶的级别和应用场景来看,有如下几类基本的行车场景:
(1)本车道内行驶;
(2)变道;
(3)十字路口;
(4)匝道。
在不同场景下,影响用户体验的因素各不相同。如本车道内行驶时,车辆的加减速响应和舒适度会显著影响驾驶员的体验;而变道时,变道成功率和变道时机则更为重要;匝道场景下,进出策略和匝道行驶稳定性的影响程度更高。
因此,我们需要基于不同的场景,分析在不同场景下,对用户体验影响显著的各项因素,并在开发过程中,重点考虑这些因素,并转化成智驾系统的性能指标。
2.1.1 本车道内行驶
车辆在本车道内行驶,且不涉及变道,是最基本的行车场景。根据在本车道内行驶可能遇到的情况,可以再细分为4个子场景:直道行驶;弯道行驶;跟车行驶;以及前方有车切入和切出,即Cut-In/Out。
下面我们具体分析在不同的子场景下,对用户体验影响显著的因素,以及对应的智驾性能指标,汇总后的内容见表4。
通常情况下,用户会在直道上开启智能驾驶功能,因此直道行驶时的智驾功能开启条件是影响用户体验的一项因素。需要有明确、易记、方便的开启条件,用户才会乐于使用。
对应的性能指标主要是车速,如ACC功能开启时,需要有合理的初始车速要求和车速范围限定,过高或过低的车速限制都会影响使用体验。当前主流的做法是将开启车速限定在30kph以上,但随着算法的进步和对自家技术的自信,蔚小理等新势力也在逐渐降低车速要求,10kph甚至更低都可能实现。
在任何场景下,舒适性都是影响用户体验的直接因素。在直道行驶时,舒适性主要体现在车速增加时的加速度,以及车速降低时的减速度;过大的加减速度会让用户感觉到危险,过小的加减速度则显得系统反应迟钝,引起抱怨。
此外,直道行驶时,车道保持的效果也很重要,平稳地保持在本车道内行驶,是驾驶员和乘客的基本需求。车道保持效果可以通过车辆居中度体现,即车辆距离两侧车道线的距离。
弯道行驶时,智驾系统的自动过弯能力是首先要考察的因素。可以通过的弯道半径,直接反映出系统的过弯能力。弯道半径越小,可以通过的弯道越急,系统的过弯能力越强,那么用户对系统的信赖度也会更高。
弯道场景与直道场景有着共同的影响因素:舒适性和车道保持效果。
弯道行驶时的舒适性,主要通过车辆的横向状态参数体现,如横摆角、侧倾角及侧向加速度等。当然,用户的主观感受也是舒适性的重要指标。
跟车场景下,由于涉及到外部车辆,因此安全感非常重要,此时的跟车时距与安全感紧密相关。适当的跟车时距,可以让驾驶员感觉不到碰撞风险,没有压抑感,同时也能避免被频繁加塞。
另外,舒适性和响应情况也是需要考虑的因素。前车车速发生变化时,自车的响应时间、加减速度等,都会影响功能使用体验。
Cut-In/Out场景是本车道内行驶的一种紧急场景,因此智驾系统的识别能力尤为重要。能够提前识别的距离越远、时机越早,就越能避免危险,保证安全。
另外,与跟车场景一样,Cut-In/Out场景下的舒适性和响应度也直接影响用户体验。


表4 本车道行驶场景的用户体验影响因素
除了直道、弯道、跟车、Cut-In/Out这4种基本和典型的子场景外,还有其他场景也属于本车道内行驶的情况,包括一些特殊场景。如车道线合并、分叉、消失,车道内有障碍物,施工引导变道等等,也是我们需要考虑的。
另外,系统对交通标志和周围障碍物如行人等的识别能力,也影响智驾系统的性能,从而影响到用户体验。
2.1.2 变道
变道是出行场景中,出现频率极高的场景。在超车、地形变化、车道封闭等状况时,都会发生变道动作。
变道能力体现了智驾系统在变道场景下的边界能力。变道成功率、变道的车速范围要求、道路曲率范围、车道宽度范围以及极限的变道距离等,都是系统变道能力的指标。其中变道成功率是一个统计数据,需要基于大量的测试结果,才能得出相对准确的结论。
目前量产的智驾功能,对于变道时的车速范围,都有一定要求,常见如最低45kph、最低60kph等。随着算法能力的提升,对于车速和道路曲率、宽度等条件的要求,正在逐渐放宽。
危险预判能力是用户安全感和信赖感的保证,只有系统能够及时预判出风险并提示用户,用户才会对系统逐渐产生信任和安全感。试想,如果用户自己能够发现相邻车道有车辆快速接近,不能变道,但系统却没有识别出来,用户怎么可能信任这套智驾系统呢?
变道时的危险预判能力主要体现在系统对危险源的识别率,以及危险源的判定条件如距离、相对速度等方面。识别率越高,提前识别的距离越远,则危险预判能力越强。
合规、合法也是不可或缺的因素,尤其在变道场景时,更容易出现违规操作。因此,能否准确识别虚、实线,能否正确地按车道线变道,是考量变道合规性的
重要因素。
舒适性是永恒的主题。在变道场景中,系统的决策时间和完成时间会影响用户对系统能力的评价,而变道时的车速变化策略、加减速度、横摆角速度、侧向加速度等车辆状态参数,则直接影响用户的舒适体验。
可控感是人机共驾的重要因素,无论任何功能,只要不是完全的自动驾驶,就要保证驾驶员对车辆的可控感。在变道场景中,驾驶员如转动方向盘或反向拨转向灯,车辆对驾驶员操作的响应情况,是评估可控感的主要指标。

表5 变道场景的用户体验的影响因素
2.1.3 十字路口
十字路口是城区行驶的常见场景,也是较为复杂的场景。车道线、斑马线、箭头、引导线等多种交通静态要素,以及车辆、行人、两轮车、动物等多种交通动态参与者,再加上实时变化的红绿灯,共同组成了十字路口这一经典的城区场景。
车辆在十字路口的行为主要有停车、直行、转弯、掉头等,因此我们需要考虑的用户体验影响因素,可以部分借鉴前文提到的直行、弯道和跟车行驶场景的各项因素。此外,车辆识别红绿灯,以及自动按红绿灯行驶的能力,是在十字路口场景需要重点考虑的因素。

图6 典型十字路口(图片来源:关于荆州十字路口交通的建议 - e线民生 - 荆州新闻网 (jznews.com.cn))
2.1.4 匝道
匝道是高速公路和城市立交所特有的场景。作为不同主干道之间的连接部分,在匝道场景下的体验,是评估智驾系统的重要内容。
匝道场景具体可以细分为匝道内行驶、进入匝道和驶出匝道等3个子场景。
由于目前匝道基本上都是弯道,因此在匝道行驶的用户体验影响因素和指标,可以参考前文弯道场景的内容。
而在进入匝道和驶出匝道的场景中,重点需要考虑进、出匝道的策略和车速变化。例如,进入匝道时,需要提前向右侧车道变道,并提前减速,那么提前变道和减速的时机就很重要;驶出匝道时,车速如何变化,是否能否自动加速到道路限速等,都是影响使用体验的因素。
此外,进入匝道和驶出匝道进入主路的成功率,也是评价系统性能和用户体验的重要指标。
2.2 泊车场景
泊车场景主要发生在停车场,因此与行车场景相比,较为简单。
按泊车的完整流程,泊车场景包括停车场内自动行驶、搜索车位、泊入和泊出车位等。
2.2.1 停车场内行驶
当前的停车场类型主要可以分为以下4种:地下停车库、停车楼、露天停车场和路边临时停车位。不同类型停车场的基础设施、路面状况、光照条件等都各不相同,因此车辆在不同停车场内行驶的表现也会有差异。
总体来说,在停车场内行驶,主要考察车辆的轨迹规划能力和感知定位能力,以及对障碍物的识别能力。
表6汇总了停车场内常见的静态特征和动态障碍物,智驾系统需要准确识别这些特征和障碍,才能做到安全高效地在停车场内行驶。
在停车场内自动行驶与低速的行车场景类似,用户体验的影响因素和指标项可以参考低速的行车场景。

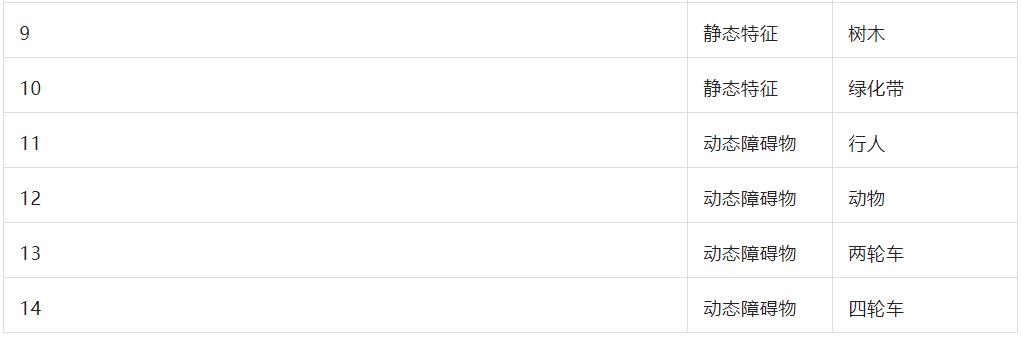
表6 停车场内常见的动、静态物体
2.2.2 搜索车位
搜索车位的用户体验,主要考察车辆对车位的识别能力。车位识别的准确率越高,说明车位识别能力越强,用户的体验也会越好。
停车位的类型多种多样,按车位线情况可分为标线车位与非标线车位,按车位方向可分为垂直车位、水平车位与斜列车位等。表7汇总了常见的车位分类依据和具体类型。
需要说明的是,车位搜索能力也应该基于多次测试的统计数据来评价,样本量太小,没有普遍意义。

表7 常见车位分类依据和具体类型

图7 车位标线示意图
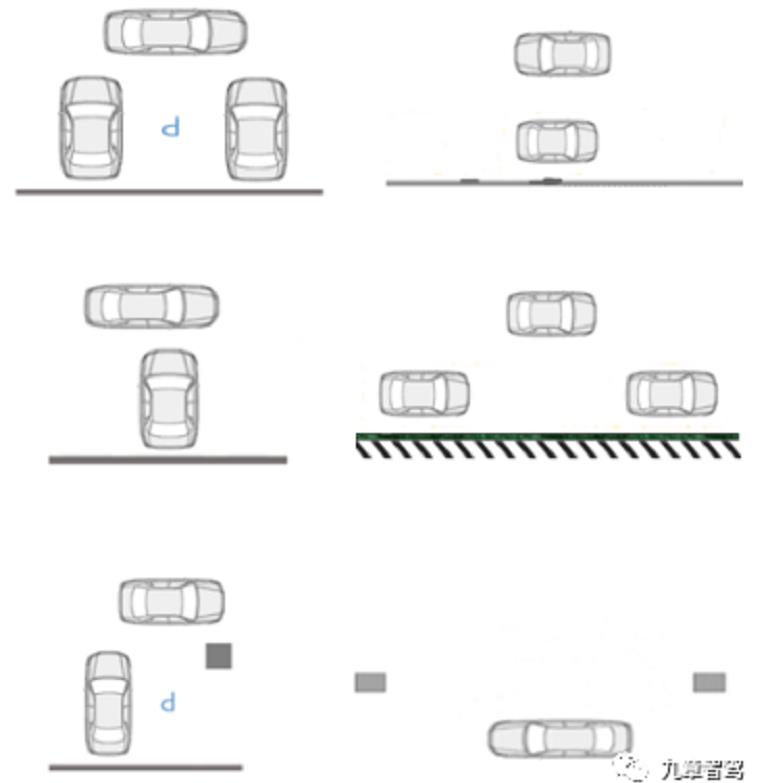
图8 部分空间车位示意图
2.2.3 泊入和泊出车位
泊入车位是泊车过程的最后一步,也是智能泊车的最初应用场景。
当搜索到适合的车位时,智驾系统便控制车辆自动泊入车位,期间的横纵向控制和挡位切换等操作,都由系统自动完成。
泊入能力是影响泊入体验的首要因素,体现了系统的泊车能力。泊入能力的指标包括成功率、可泊入的车位尺寸范围、车速范围等,需要综合考虑车辆状态参数和车位参数等。
舒适性同样是重要的影响因素。对于驾驶员在车上的智能泊车系统,舒适性直接影响了用户的体验。车辆在泊车过程中的加减速度和系统完成泊车的时间等指标,可以体现舒适性。
泊车的规范性是另一项影响因素,停放规范整齐的车辆,会增加用户的好感和信任。是否停放端正、位置是否居中、与车位线或相邻车辆的距离如何,都反映了系统泊车的规范性。
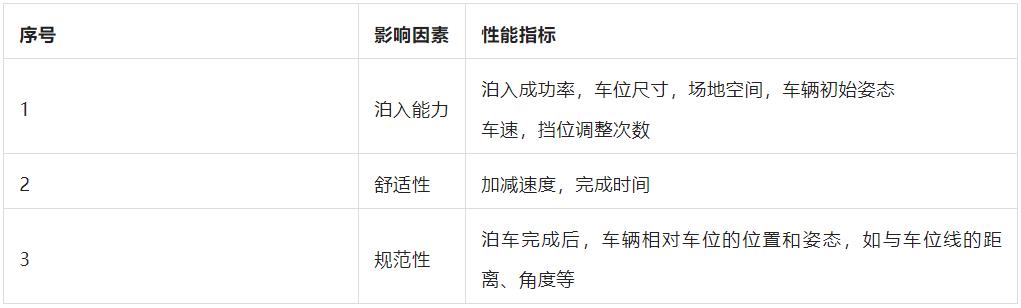
表8 泊入车位的用户体验影响因素
泊出车位是泊入车位的相反过程,其影响因素与泊入场景基本一致。
三、功能与场景的关联
前文我们详细解读了智能驾驶的功能体系和场景体系,而这两种体系也分别代表了开发侧和用户侧。因此,分析不同功能与场景之间的关联,找出其内在联系,是打通开发侧与用户侧的重要途径。
3.1行车功能与场景
根据前文对智能驾驶功能体系的解读,行车功能主要有L1级别的ACC、LCC、ALC,L2级别的TJA,L3级别的NOA,其中NOA又分为高速公路区域的NOA和城区的NOA。
从功能描述中不难看出,ACC的主要作用是自动控制车辆纵向行驶,LCC主要用于保持车辆在车道内居中,因此ACC和LCC主要应用于本车道内行驶的场景。在这2项功能开发过程中,需要重点考察在前文提到的在本车道内行驶场景中,涉及的性能指标项。其中ACC需要考虑所有的指标,而LCC则重点考虑车道保持效果和舒适性。
ALC的作用就是变道,因此应用于变道场景。在开发ALC的过程中,开发者要重点关注的是变道场景下的用户体验影响因素,如变道能力、舒适性、合规性等,及其对应的性能指标。
TJA功能是ACC+LCC+ALC的叠加效果,因此需要包括这3种功能所包含的场景,即本车道内行驶+变道场景。相应的,需要考虑的用户体验影响因素和性能指标,也应该是这些场景的内容。
NOA功能分为高速NOA和城区NOA。高速NOA对应的场景除了TJA功能涉及的场景外,还需要加入匝道场景;城区NOA场景则是TJA场景加上十字路口。可以看出,NOA涉及了最多、最全面的场景,开发过程种需要考虑大量的用户体验和性能指标项,因此想要做好NOA功能,是具有一定难度的。
当然,NOA功能涉及的场景很复杂,我们在此只列举了典型的基本场景,还有其他一些场景也是开发者需要不断发掘和补充的,如桥梁、隧道、非结构化道路、学校等等,都有其独有的特点。基于基本场景,不断扩展,丰富场景库,是智驾开发的一项长期而有意义的工作,对于功能开发和提升用户体验,非常有帮助。
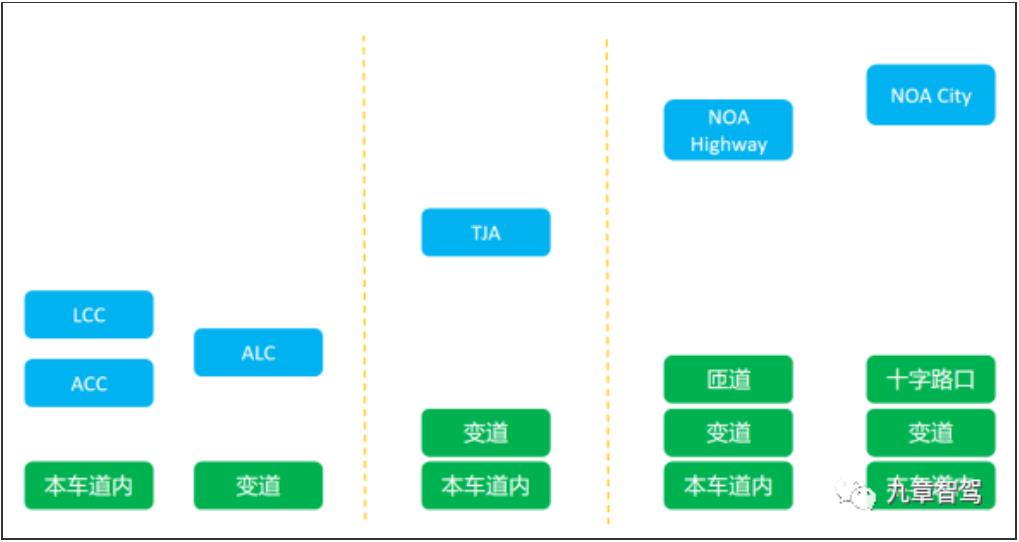
图9 行车功能与场景的关系图
3.2泊车功能与场景
泊车功能包括L2级别的APA、RPA,L3级别的SS、HPA,L4级别的AVP。
APA和RPA的作用区域是在停车位附近,将车自动泊入泊出,不同之处在于APA是驾驶员在车上监控并随时接管,RPA是驾驶员在车外监控并通过遥控装置随时接管。
因此,APA和RPA的应用场景是泊入和泊出车位,在功能开发的同时,需要全面考虑泊车能力、舒适性和规范性等影响用户体验的因素。
SS和HPA的作用区域是停车场内,包括停车位和停车场内的道路。SS负责将车从停车位召唤到指定位置,HPA则负责将车从停车场入口停到特定车位上。
可以看出,SS的应用场景是泊出车位,加停车场内行驶;HPA的应用场景是停车场内行驶,加搜索车位,再加泊入车位。开发者需要重点关注车辆在停车场内低速行驶的体验,以及搜索车位的能力,这对车辆的融合感知和定位能力有很高的要求。
AVP作为智能泊车的终极解决方案,属于L4功能,是所有智能泊车功能的集大成者,其作用区域覆盖了从车主下车,到车辆泊入的全过程,以及相反的召唤全过程。AVP的应用场景是前文提到的所有泊车场景的叠加,包括停车场内行驶、搜索车位、泊入和泊出车位。
此处我们忽略了车辆从车主下车点到停车场的这段距离,由于这段场景在停车场外,并且存在不确定性,在本文中就不展开了。
AVP功能需要全面关注泊车全部场景下的用户体验和性能指标。另外,由于AVP功能开启时,用户已经离开车辆,因此高安全性和鲁棒性,也是至关重要的,需要有足够的安全冗余设计。
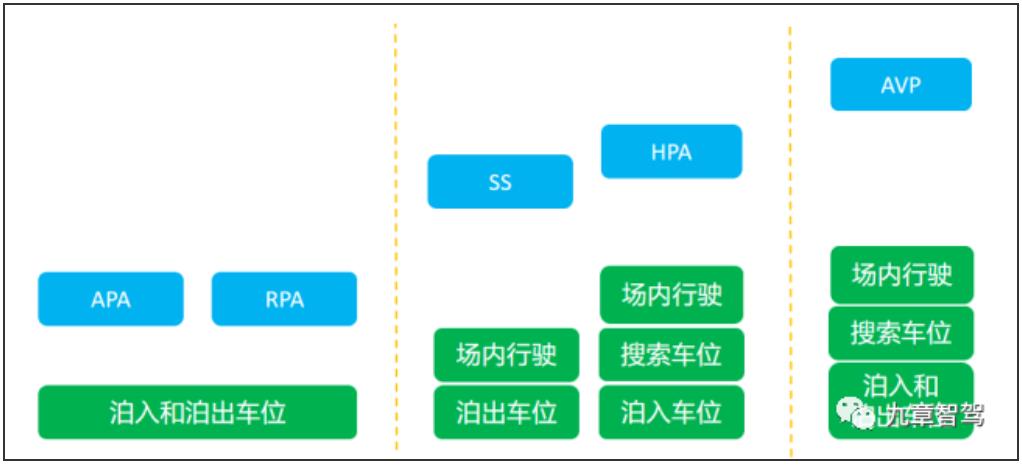
图10 泊车功能与场景的关系图
四、结语
本文我们详细解读了当前智能驾驶的功能体系和场景体系,并分析了两者之间的联系,建立了功能体系与场景体系的关联架构。
通过全面考虑功能与场景的关联,基于功能规划和应用场景,综合制定智能驾驶的性能指标,有利于在开发早期就打通开发侧和用户侧的壁垒,将用户体验全程纳入开发过程,实现同步开发。
当然,功能是不断迭代的,场景是不断完善的,我们在智驾开发过程中,需要基于这些基本功能和基本场景,持续升级拓展,真正地做到产品需求源于用户,智驾功能服务于用户,打造出高满意度的智能驾驶解决方案。
来源:九章智驾 ,作者Engineer X






