
与传统底盘相比,智能底盘的技术、指标、开发和测试方法、规范与标准将发生重大变化,有必要制定智能底盘的技术路线图。路线图的研究凝聚了行业中整车、零部件企业和研发机构的智慧和经验,得到了行业中众多专家的宝贵建议和大力支持,目前形成了阶段性的成果。在此谨代表“线控制动与底盘智能控制工作组”向大家发布“智能底盘技术路线图框架”。

01 智能底盘及基本要求
随着汽车电动化与智能化技术的革命,底盘也迎来了从传统底盘、电动底盘、再到智能底盘的技术变革。那么什么是智能底盘呢?

底盘智能化后,仍然保留了它的两大功能,一是承载,二是行驶。但承载的对象和完成行驶的手段发生了变化。智能底盘为自动驾驶系统、座舱系统、动力系统提供承载平台,这是承载对象的变化。
行驶任务实现方面,我们从人车路的关系梳理了智能底盘具备的新能力。在车与路的关系中,智能底盘对车轮与地面间的相互作用具备认知、预判和控制的能力。在车与人的关系中,汽车变为无人驾驶后,原本人对底盘异常状态的感知和适应性操纵消失了,智能底盘应具备管理自身运行状态的能力。这是底盘新增的几个能力。这些能力都服务于行驶任务,所以最终智能底盘还是具体实现车辆智能行驶任务的系统。这就是我们对智能底盘的定义。

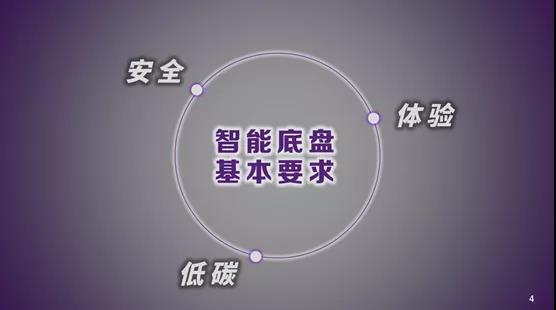
智能化后,对底盘提出了一些新的要求,也继承了原有的要求。底盘与汽车行驶安全直接相关,因此第一个要求仍然是安全。第二个要求是体验,智能汽车对体验十分重视,而底盘是决定体验的重要环节,底盘方面的体验是一种高级的、与汽车运动相关的体验,这是第二个要求。第三个要求是低碳,底盘智能化后,引入一些耗能的装置,因此低碳也是智能底盘的一项基本要求。
在对智能底盘的安全要求上,一方面,智能底盘应进一步提升主动安全性能,比如车辆的制动安全性、行驶稳定性等。第二方面,应扩展主动安全功能,比如通过扩展动力学控制边界,缓解T形避撞损失、避免追尾后二次碰撞。第三方面的要求是失效运行安全,包括失效后冗余系统的切换性能和功能安全水平。

智能底盘的体验要求方面,第一是应进一步提升驾乘舒适性,促进纵横垂动力学协同控制与智能驾驶协同优化,提升驾乘舒适性。二是应提供个性化驾乘体验,收集与识别个性化驾乘数据,通过人车交互与自学习迭代,提供符合乘员心理预期的驾乘体验。三是应提供专业驾乘体验,基于专业驾驶员行为数据分析,提供专业驾驶服务、提升驾乘乐趣。

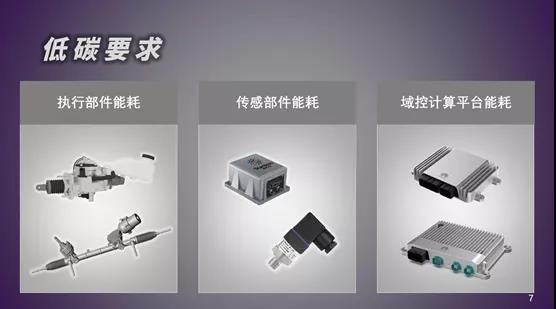
智能底盘的低碳要求方面,底盘自身的能耗不容忽视,比如线控制动系统、线控转向系统、主动悬架中的电动单元,以及域控制器计算芯片的能耗应努力降低。
02 智能底盘的总体目标和技术路线图思路
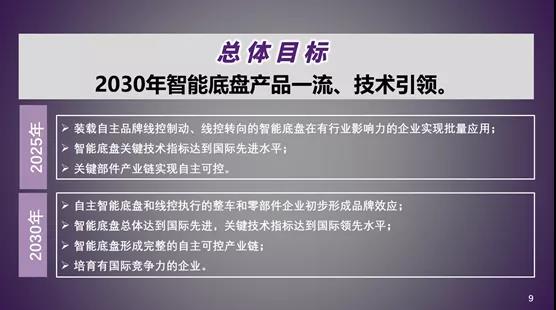
总体目标:2030年智能底盘达到产品一流、技术引领。
2025年目标:装载自主品牌线控制动、线控转向的智能底盘在有行业影响力的企业实现批量应用;智能底盘关键技术指标达到国际先进水平;关键部件产业链实现自主可控。
2030年目标:自主智能底盘和线控执行的整车和零部件企业初步形成品牌效应;智能底盘总体达到国际先进,关键技术指标达到国际领先水平;智能底盘形成完整的自主可控产业链;培育有国际竞争力的企业。
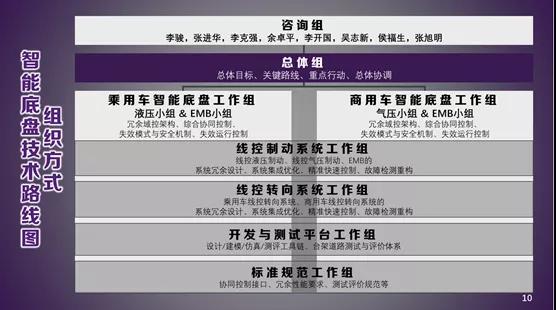
整个智能底盘技术路线图研制的组织方式是,设立咨询组和总体组。按照两纵四横的理念设六个工作组:两纵是乘用车智能底盘组、商用车智能底盘组、四横是线控制动组、线控转向组、开发与测试平台组、标准规范组。其中乘用车智能底盘组和商用车智能底盘组统领其他四个工作组。
路线图的研究内容:

-
一个是智能底盘产业与总体目标、以及2025和2030年的阶段目标。
-
二是智能底盘的产品、技术和能力的现状分析。
-
三是路径选择与行动建议,包括2025年、2030年产品与技术发展路径,关键技术指标,关键行动计划和时间表
-
智能底盘技术路线图的工作思路是:基于自主可控产业链的总目标,采取跟随发展和赶超发展结合,部件与底盘融合,乘用车与商用车并举,发挥整个行业的力量,充分沟通与交流,制订智能底盘技术路线图。

03 智能底盘的具体目标与技术路径
(1)乘用车智能底盘板块
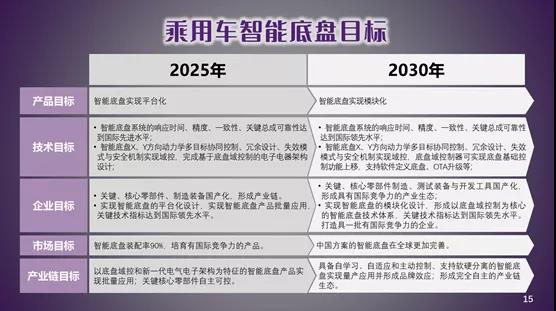
2025年目标:智能底盘实现平台化,动力性能实现X、Y双向域控,以底盘域控和新一代电气电子架构为特征的智能底盘产品实现批量应用,关键核心零部件自主可控
2030年目标:智能底盘实现模块化,动力性能实现X、Y、Z三向域控,具备自学习、自适应和主动控制、支持软硬分离的智能底盘实现量产应用并形成品牌效应;形成完全自主的产业链生态。
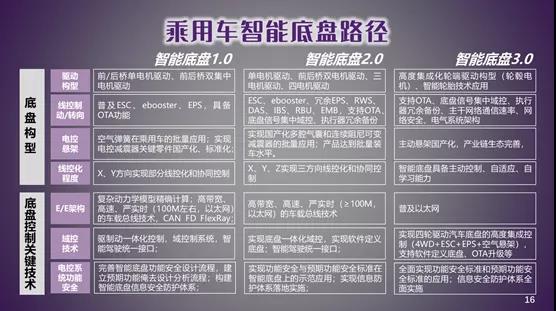
关键技术路径是:
-
智能底盘1.0,底盘纵横向协同线控、实现OTA;空气弹簧批量应用;底盘具备域控、形成标准化接口。
-
智能底盘2.0,底盘纵横向垂三维协同线控、具备动力学控制全功能的冗余备份;可变减震器批量应用;实现软件定义底盘、形成标准化软件分离
-
智能底盘3.0,底盘纵横向垂三维协同实现自适应和自学习、全面满足功能安全、预期功能安全、信息安全对底盘软件、硬件、通讯的要求;主动悬架产业链生态完整;高度集成的软件定义底盘、OTA升级
(2)商用车智能底盘板块
2025年目标:产品功能安全、冗余架构满足整车需求、底盘横纵融合协控;技术指标主要考虑安全性和舒适性;市场目标完成L3底盘及子系统量产;自主底盘系统供应商占据主导地位。
2030年目标:产品实现健康管理和动态综合控制;技术指标增加考虑节能性;市场目标完成L4底盘及子系统量产;自主供应商建立国际领导性品牌影响力。

关键技术路径是,应对L3自动驾驶需求,底盘层面实现子系统冗余,采用分布式控制结构、纵横向独立主动控制、系统健康报警;应对L4自动驾驶需求,底盘域控实现自动驾驶最小备份,纵横向协同控制;应对L5自动驾驶需求,底盘域控实现自动驾驶全功能备份,纵横垂综合协同控制。

(3)线控制动系统板块
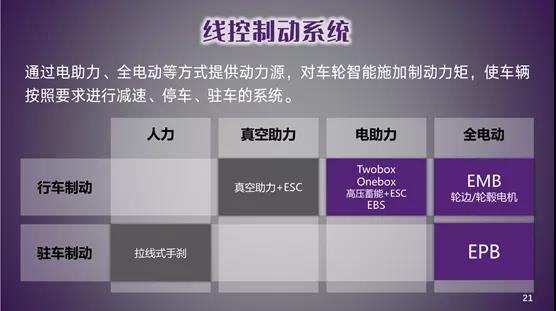
路线图线控制动系统指的是通过电助力、全电动等方式提供动力源,对车轮智能施加制动力矩,使车辆实现减速、停车、驻车的系统。包括线控液压、线控气压、EMB、EPB等。
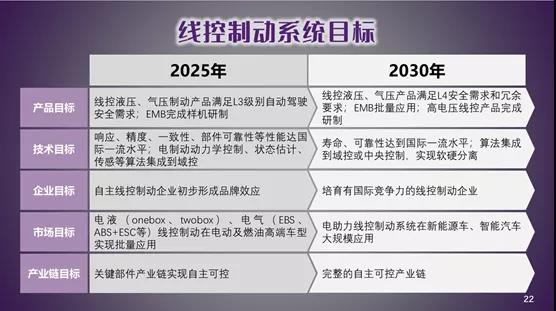
2025年目标:线控液压、气压在电动及燃油高端车型实现批量应用,最高满足L3安全需求;EMB完成样机研制;技术方面,控制性能达到国际一流水平,状态估计、传感等部分算法集成到域控;关键部件产业链自主可控。
2030年目标:线控液压、气压实现大规模装车应用,最高满足L4安全需求;EMB完成批量应用;技术方面,控制性能寿命、可靠性达到国际一流水平,实现软硬分离;完整产业链自主可控
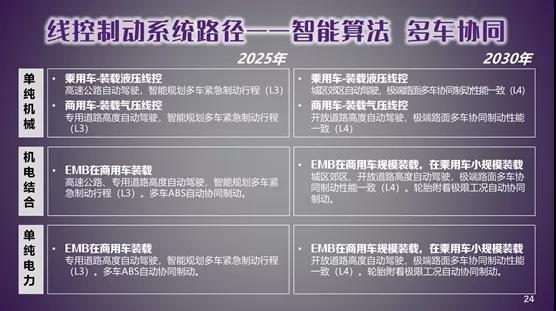
路径方面,单纯机械制动、EMB以及二者结合的技术路线并存。冗余方面2025年线控制动与现有ESC、EPB等组成多层次冗余,2030年线控制动与全新备份制动、EPB等形成冗余。

算法方面,2025年面向L3使用场景实现多车紧急协同制动,2030年面向L4使用场景实现极端路面、轮胎附着极限工况等多车协同制动。
硬件方面,2025年关键部件兼容、性能国际一流,耐热达到量产水平;2030年可靠性和寿命达到国际一流水平。

软硬分离方面,2025年与电机控制相关、车载状态估计、传感等软件集成域控;2030年软件集成到域控或中央控制器。

(4)线控转向系统板块

路线图涉及的是方向盘与转向执行没有直接机械连接的系统。

2025年目标:线控转向在高端车型实现批量应用,最高满足L3安全需求;具备关键零部件、控制策略的研发能力;关键部件产业链自主可控。
2030年目标:线控转向应用形成市场规模,最高满足L4安全需求;具备全部零部件、控制策略、故障诊断的研发能力;全产业链自主可控。
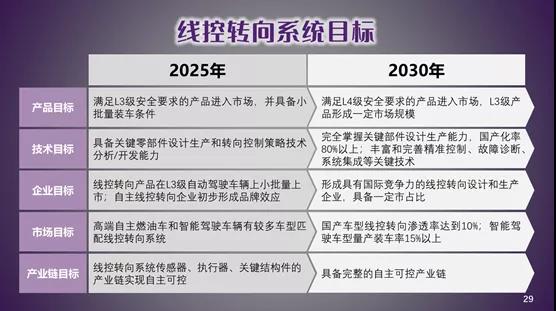
路径是,应对L3自动驾驶需求,采用六相电机、驱动电路冗余;应对L4自动驾驶需求,采用六相电机、双ECU冗余;应对L5自动驾驶需求,双电机及控制系统冗余。

(5)开发与测试平台板块
2025年目标:完成数字化智能底盘1.0模型,支撑性能验证、功能安全验证;形成系统开发与测试平台架构;能够支撑多个代表性整车企业典型车型的开发;平台关键技术自主可控。
2030年目标:完成数字化智能底盘2.0模型,支撑部件到整车研发全链条,实现商业化;开发与测试技术能力达到国际先进水平;平台实现大面积推广,形成产业。
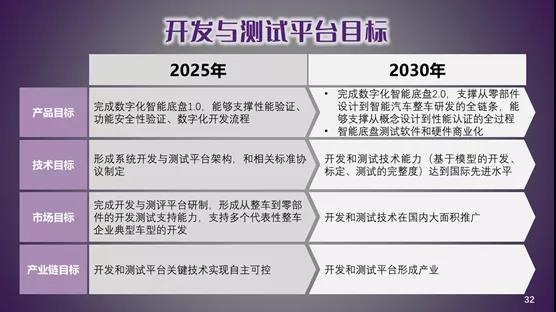
开发测试平台的路径是,采用基于模型的路径,从流程体系、评价体系、工具链、平台系统四方面,促进智能底盘研发能力和水平的整体提升,包括提升开发过程理解水平、指标水平和创新能力,提升测试过程数据积累、协同能力、验证效率和产品质量。

(6)标准规范板块
2025-2030总体目标:完成智能底盘标准规范体系的建设,基于自主产品和研发平台构建自主可控的智能底盘技术体系。包括定义与术语、技术要求、安全要求、测试方法、开发测试平台、接口等方面。
路径采用双线并进,一条线是应急,为自主创新疏理、修订、制订标准,其中当前建议优先修改的是线控转向相关国标。

二是基于自主创新,建立自主的标准规范体系。新标准的开发应从冗余系统的标准化研究开始,包括功能、传感、执行器、域控、接口、测试等项目以及各子项的标准化。

后续安排,近期围绕安全、体验、低碳梳理形成整体及各板块关键指标体系,2022年1月完成路线图草案发布,公开征求意见,预期2022年7月完成路线图正式定稿和发布。

欢迎大家参与路线图编制工作,敬请大家提出宝贵意见与建议!联系人:李老师 18210233646
线控制动与底盘智能控制工作组
为了进一步凝聚整车、零部件及科研院所优势力量,形成合力,推动线控制动与底盘智能控制共性技术突破及产业化发展,电动汽车产业技术创新战略联盟于2021年4月,在三届二次理事会上审议成立了“线控制动与底盘智能控制工作组”,由联盟技术专家委员会委员、清华大学教授张俊智担任工作组主任,比亚迪汽车工程研究院副院长凌和平,奇瑞新能源副总经理、汽车工程研究院院长倪绍勇,清华大学研究员、汽车新技术研究院总工黄朝胜担任工作组副主任,来自整车企业、零部件企业、高校及研究院所等37家单位的41名专家共同组建了工作组。
乘用车智能底盘板块由“乘用车智能底盘组”完成,牵头单位为比亚迪汽车工程研究院,目前参与单位包括奇瑞汽车、长城汽车、东风汽车、瑞立科密、经纬恒润、亚太机电、蜂巢智能转向、一汽集团、万向钱潮、百度、北京航空航天大学、合肥工业大学、清华大学、国汽智联。
商用车智能底盘板块由“商用车智能底盘组”完成,牵头单位为一汽解放商用车开发院,目前参与单位包括同济大学、比亚迪、宇通客车、长安新能源、浙江万安科技、蜂巢智能转向、瑞立科密、万向钱潮、清华大学、北京航空航天大学、合肥工业大学、深圳技术大学。
线控制动系统板块由“线控制动系统组”完成,牵头单位为清华大学,目前参与单位包括浙江万安科技、长城汽车、浙江亚太机电、瑞立科密、拿森电子、北京航空航天大学、长安新能源、蜂巢智能转向、万向钱潮、比亚迪、北京新能源汽车、江铃汽车、一汽集团、中国汽研、精诚工科。
线控转向系统板块由“线控转向组”完成,牵头单位为蜂巢智能转向,目前参与单位包括清华大学、吉林大学、吉利汽车、北京新能源汽车、北京航空航天大学、合肥工业大学、一汽集团、江铃汽车、长城汽车、一汽解放商用车。
开发与测试平台板块由“开发与测试平台组”完成,牵头单位为清华大学,目前参与单位包括华为、中科院电工所、万向钱潮、一汽解放商用车、比亚迪、中汽中心、蜂巢智能转向、经纬恒润、一汽集团。
标准规范板块由“标准规范组”完成,牵头单位为经纬恒润,目前参与单位包括中汽中心、比亚迪、中国汽研、中科院电工所、一汽解放商用车、清华大学、弗迪动力、北京航空航天大学、蜂巢智能转向、百度。
说明:目前单位排序不分先后。
来源:电动汽车产业技术创新战略联盟 线控工作组






