
导读:最近自动驾驶产业,也算是寒意融融,从欧美大众福特烧完30亿美金退出的Argo自动驾驶的投资,到Mobileye估值500亿到只有170多亿上市,好在上市保住了200亿的市值,再到小马智行国内外的裁员,等等。
其实这个现象早有征兆,首先是各个新势力的高阶智能驾驶系统交付延迟,再到国内智能驾驶供应商们争先恐后的上车参与各种招标,高喊L4降维做L2,这都说明大家激进之后,发现水位下降了,那个裸泳的人可能就是我。
过去几年整个产业都弥漫着激进和浮躁的味道,最有代表性的就是某些媒体的渲染,拿到Demo测评就喊开箱测评。资本和消费者都以为自动驾驶的发展就像坐火箭一样,“咻”的一声就来了,其实任何一个道路都是曲折坎坷,需要一步一步的走出来的,没有任何珍贵的弥久的东西是一路直奔而来的。

公共开放道路的自动驾驶,场景复杂变量多,牵扯到自身以及交通安全的更是,他牵扯的是个人,家庭,群体的生命和安全,需要谨慎。所以,稳健的智能驾驶,需要基于交通场景的细化,满足安全的基本条件下移动出行,而非一句话,或者几个炫酷功能那么简单。
所以本次我们借用Mobileye上市的资料和其发布的产品路线图,来分享下基于视觉图形人工智能的自动驾驶各个level一般的功能,以及其所需的硬件。希望给大家带来一些信息和启发对于自动驾驶的认识和思考。
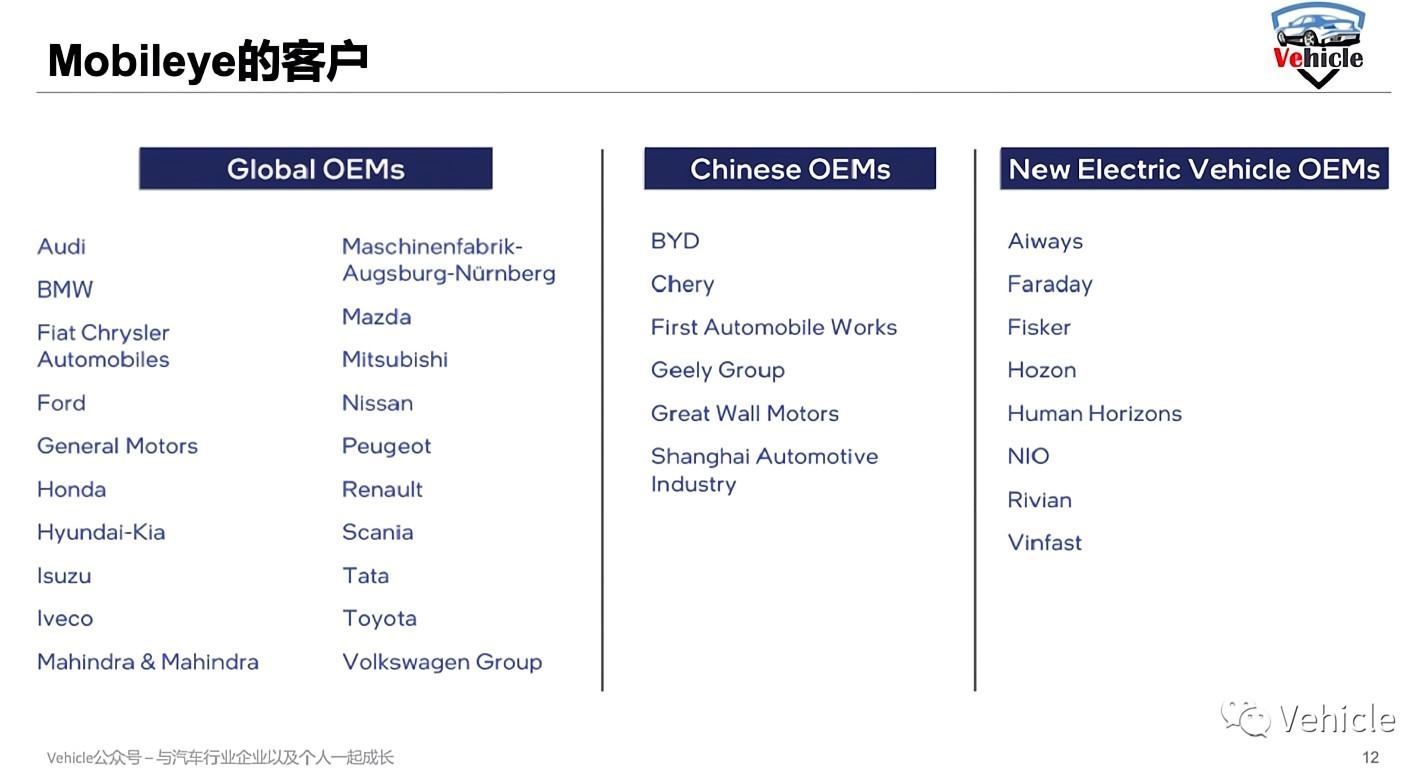
Mobileye其实是视觉智能驾驶的布道者,特斯拉最原始的方案就是采用Mobileye,国内小鹏,蔚来的智能驾驶都是从应用Mobileye开始,到Mobileye上市开始为止Mobileye芯片销量高达1.17亿片,但过去两年以英伟达等为首的高算力,灵活,开放的软硬件平台崛起,让Mobileye黯淡失色,Mobileye的母公司英特尔也算害怕了,抓紧将其推开上市,其产品序列也规划拓展从辅助驾驶到高阶智能驾驶再到移动出行服务平台。
所以Mobileye的方案和产品路线也算代表典型的从L2步步升入到高阶智能再到自动驾驶的路线的一种,可以窥探下自动驾驶道路上功能和硬件步伐。
当然读产品功能序列之前可以先了解下Mobileye的底层技术方案,Mobileye引以为傲的是其视觉算法,视觉处理芯片,REM地图,RSS安全驾驶策略,然后结合英特尔的资源正在拓展4d毫米波成像雷达以及激光雷达。

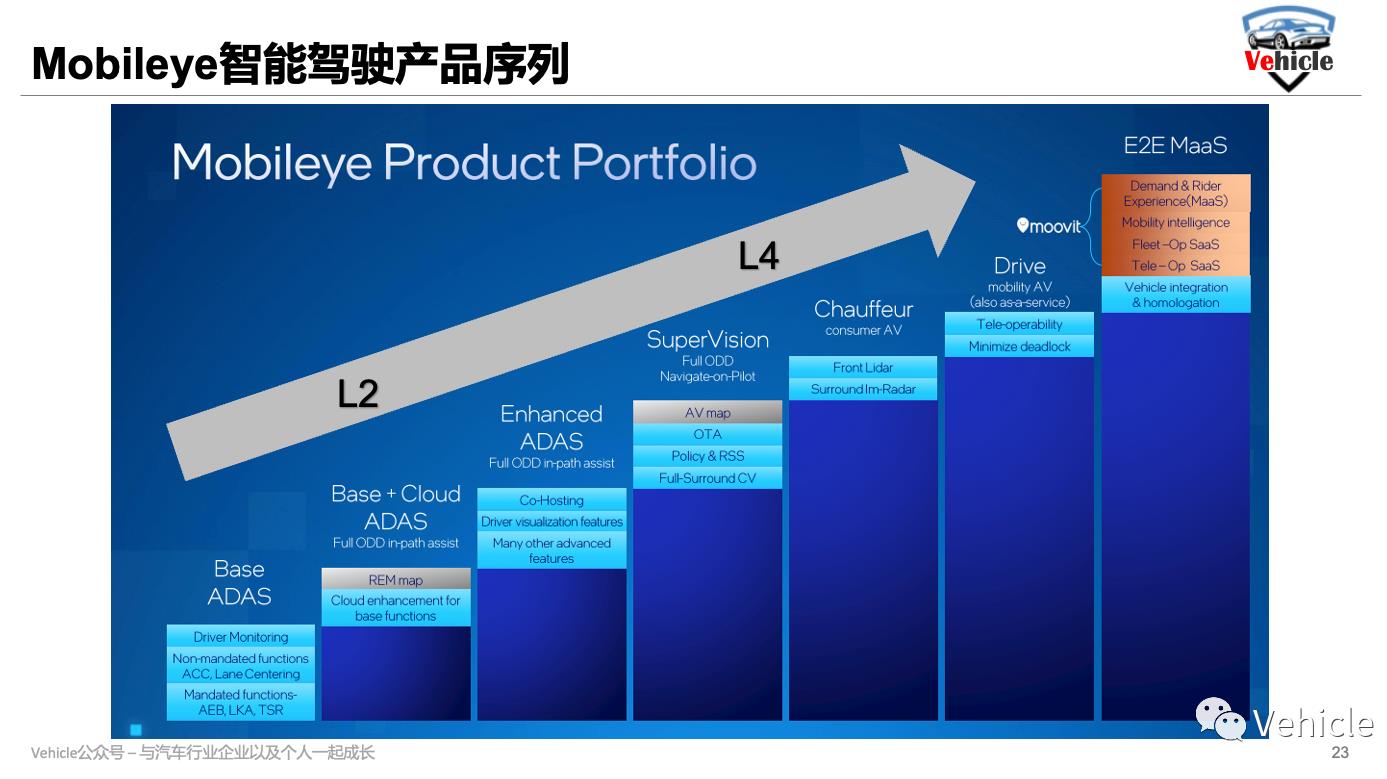
Mobileye将其产品功能序列分为:
Base Driver Assist基础辅助驾驶功能。
Enhanced ADAS增强辅助驾驶功能。
SuperVision 超级视觉系列。
Chauffeur系列。
Drive系列。
分别从基础辅助驾驶到L2+再到L3/L4以及RobOTAxi等无人移动出行物流服务。
自动驾驶开始的首先是基础辅助驾驶功能,也就是L2以下的Base Driver Assist 功能,是ADAS 和自动驾驶解决方案系列的基础,它包括关键的安全功能,例如实时检测道路使用者、几何形状、语义和标记,以提供安全警报和紧急干预。主要是促进道路安全。
Mobileye的基础L2以及以下驾驶辅助功能主要有:
NCAP类型的安全功能例如,AEB紧急制动,FCW前向碰撞预警,TSR交通信息识别,LKA车道偏离辅助。
仅仅依靠视觉能够实现的通用安全法规,也是类似于AEB,LKA这类。
ISA 智能限速辅助。
ACC自适应巡航。
LCC划线车道居中。
LDW车道偏离预警。
HLB自动近远光灯。
Mobileye 的Base Driver Assist 主要硬件组成:1个前摄像头(可以是170万像素100度视角,也可以是800万像素120度视角)一个Mobileye Q4到Q6L的芯片处理。但当然,其中ACC功能要配合毫米波雷达实现的,毕竟Mobileye提到其单目摄像头可以检测距离的功能,但目前我没有看过有直接用,不用毫米波冗余的。

Mobileye的Enhanced ADAS 增强型基础L2驾驶辅助功能,又叫Cloud-Enhanced Driver Assist,它就是在基础性L2的基础上链接了其视觉众包 REM地图系统,可以提供的厘米级可行驶路径精度、前方路径的预见性和其他语义信息。
使用 REM地图系统,通过横向车辆控制(转向控制)提供路径辅助功能,即使在车道标记部分可见或不存在的情况下也能保持行驶路径,并通过纵向车辆控制(加减速控制)根据交通标志、道路标记、路况和其他交通情况调整速度方向或危险。它还提供了前方道路的信息,包括几何形状和驾驶语义,以及通常复杂的语义指示与不同驾驶路径的关联(例如,交通信号灯和交通标志车道关联),这些信息可以提前告知给汽车,对于智能底盘可以提供魔毯功能。
所以他可以提供的功能在原有基础功能上再有:
LCC所有车道的车道居中(而非仅仅划线车道,还支持大曲率弯道,具体多少曲率没看到相关参数)。
TSR交通信息识别并带速度调节。
TSR遮挡交通标志识别。
停车以及礼让标志提醒。
维修路面区域提醒。
可训练的泊车。
可安装第三方应用。
Mobileye 的enhanced ADAS 硬件组成:
1个前摄像头(可以是170万像素100度视角,也可以是800万像素120度视角)一个Mobileye Q4到Q6L中的芯片,和基础辅助驾驶功能的硬件一样。但可以看到此功能添加了可训练泊车和可安装第三方应用,这里其实可以看到欧美主机厂在推的50m左右的路径轨迹记忆泊车,应该就是配合此项功能而来。
目前基本上绝大部分L2驾驶辅助都是这样一个硬件配置。其中使用方案应该是绝大部分都是来自于Mobileye的方案,Mobileye截止到上市时1.17亿块芯片都应该是用在这个功能上。
目前欧美的福特的blue curise,大众Drive assistant 2.5,通用的super cruise的L2+,日产的pro pilot 2.0 的L2+智能驾驶都是基于Mobileye的方案做加法而来。Mobileye本来靠这个基础辅助驾驶活的好好的,而且其基础辅助芯片EyeQ 4系列的芯片价格都在50几美金也就是400人民币左右。但是目前智能驾驶的内卷,让Mobileye坐不住了,所以推出L2+也可以升级到L3/L4 而且兼顾泊车的Super vision 系列。
首先是SuperVision lite 61,它可以实现:
高速领航(基于REM地图或者高精地图)。
高速辅助(横向,纵向控制)。
自动变道。
前后碰撞避免。
避险机动辅助(类似于大车避让,VRU道路弱势群体避让)。
红灯识别并且制动停车。
盲区监测。
环境虚拟,也就是类似于360环境映射。
DMS驾驶员监控。
支持EyeQ kit 工具自己开发定制。
泊车功能支持自动泊车,远程泊车。
硬件组成:一个 EyeQ6 SoC,第三方提供的6个摄像头和5个雷达。摄像头预计包括前后两个远程 800万像素摄像头和4个300万像素鱼眼泊车摄像头。采用其REM地图。
可以支持硬件升级到L3/L4,升级1个前向激光雷达,1个前向FOP(front objective perception,原有摄像头FOV100度左右,可能FOV 28度更窄更远的摄像头)摄像头,可升级到L3级的60km/h以下的车道内高速领航,本车道内的危险进行安全停车。
但目前此套硬件和功能量产需要到2025年,他的特征是基于Mobileye自有方案可以进行高速领航服务同时视觉融合泊车,同时还支持EyeQ kit 工具自己开发定制。
SuperVision 52,应该就是目前吉利极氪上正在使用的方案,显然以下很多功能应该还在验证,目前并未完全释放。Mobileye表示今年极氪通过OTA已经开通高速领航辅助(到写稿时间我好像目前还没有看到),然后2022年也就是今年年底OTA完整的Mobileye SuperVision功能。
点对点的领航辅助
高速/乡下/主干道/城区领航
高速/乡下/主干道/城区辅助
自主换道
前后碰撞避免
避险机动辅助
基于第三方硬件的DMS驾驶员监控
泊车应用运行在第三方ECU,不支持应用厂商基于Mobileye的EyeQ Kit的自主性开发。
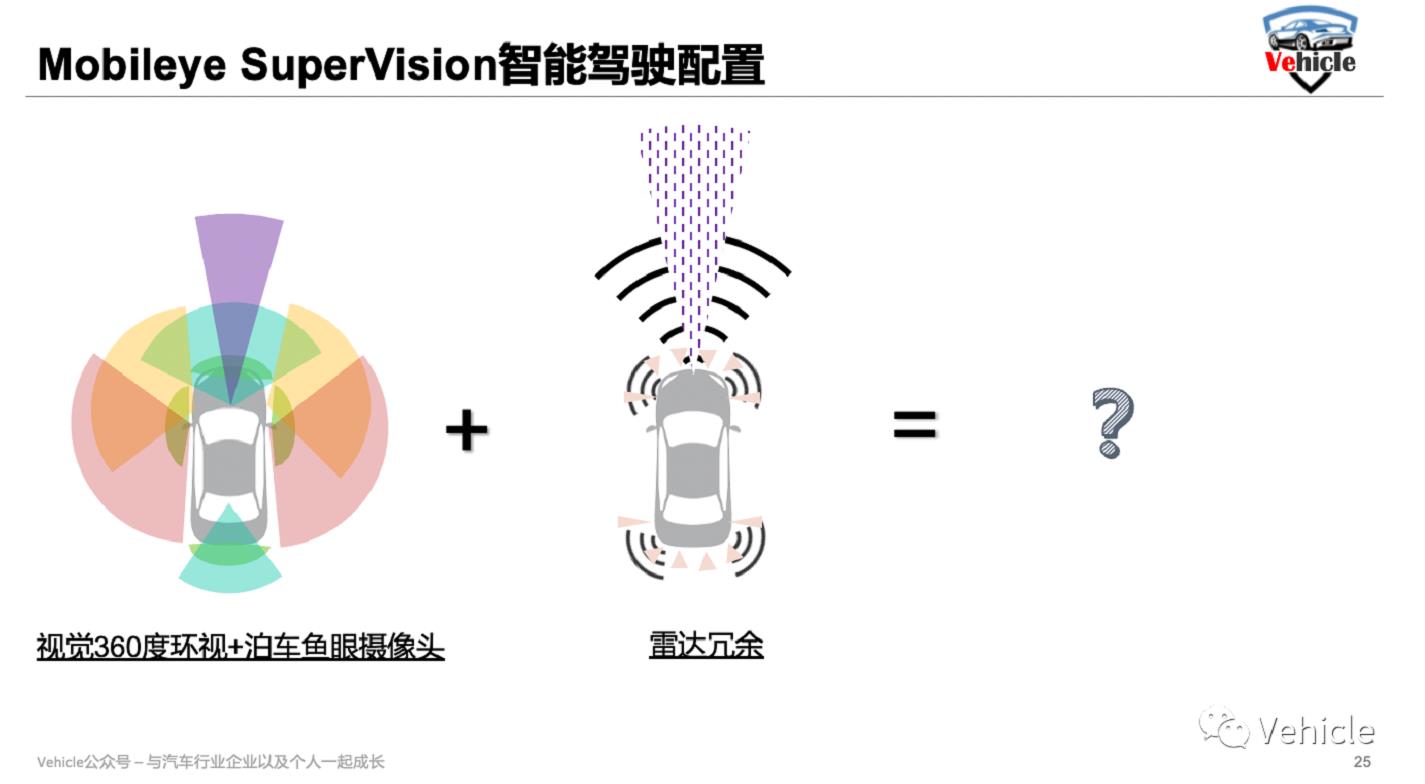
Mobileye SuperVision将采用11 个摄像头(7 个远程摄像头和 4 个鱼眼泊车摄像头)提供全面的视觉感知环绕覆盖。包括:
前置 1个800万像素FOV视场角 120 度和一个800万像素FOV视场角28 度的摄像头、
两个前置和两个后置,共4个100度FOV视场角800万像素摄像头
一个后置60 度FOV视场角800万像素摄像头
四个安装在侧后视镜和前后保险杠上的广角 192 度泊车摄像头。
使用2个Mobileye Q5H芯片提供算力支持。他使用由 REM 地图系统支持,创建 360 度环境模型,并且 RSS 将驾驶决策限制为符合安全驾驶决策的基础正式验证模型。添加1个前向激光雷达,可以升级到L3/L4,功能例如L3级的60km/h以下的车道内高速领航,车道内的危险安全停车。
SuperVision 62,计划2025年推出可以实现以下功能:
点对点的领航辅助
高速/乡下/主干道/城区领航。
高速/乡下/主干道/城区辅助。
自主换道。
前后碰撞避免。
避险辅助。
环境虚拟。
DMS驾驶员监控。
支持EyeQ kit 工具自己开发定制。
泊车功能支持L2级别的视觉融合自动泊车,远程泊车。
他的硬件感知系统和SuperVision 52类似唯一区别的是采用了2个Mobileye Q6H芯片还支持泊车的处理。可以支持硬件升级到L3/L4,例如添加1个前向激光雷达,可升级L3级的60km/h以下的车道内高速领航,车道内的危险安全停车。Chauffeur是mobileye推出的针对于L3/L4的智能驾驶方案。功能分 Chauffeur 63 也计划2025年推出。

他在SuperVision 62的功能上增加了L3/L4的以下功能:
高速/乡下/主干道/城区全场景的领航辅助。
高速/乡下/主干道/城区全场景的辅助。
高速/乡下/主干道全场景的自主变道。
穿过机动车和非机动分离的路口。
L3/L4风险处置方案,将车驶到安全的停车处而不是本车道停车。
泊车方面都是L2级别的自动泊车,远程泊车,自主代客泊车。
Chauffeur ultra的L3/L4应用增加了:
无保护转弯(十字路口,对向有来车的场景)
无人在车上的自主代客泊车
Chauffeur的视觉感知硬件和SuperVision 52类似。采用11 个摄像头(7 个远程摄像头和 4 个鱼眼泊车摄像头)提供全面的视觉环绕覆盖。但他另外采用了6个4D成像毫米波雷达和一个FMCW激光雷达冗余。第一代解决方案将基于6个 EyeQ 5 High 芯片,而下一代解决方案将由3个EyeQ 6High 或者一个 EyeQ Ultra( AV-on-Chip)驱动。Mobileye Drive是L4级别自动驾驶的技术解决方案,也大概在2025年左右推出,将包Mobileye Chauffeur中的核心自动驾驶技术(360 度视觉、REM地图、True Redundancy 雷达冗余覆盖和 RSS驾驶策略),无需任何驾驶员在车里- 可以通过远程操作和最小化需要人工输入的情况来进行车辆人工干预。

Mobileye Drive 设计使用8个 EyeQ5High SoC 提供算力(而Mobileye Chauffeur上为6个 EyeQ ® 5High SoC ),到 2025 年,它将由一个 EyeQ Ultra 提供算力。
整体解决方案将为人员和货物的移动出行,适用于各种车辆配置(如乘用车、专用吊舱/车辆、穿梭车和公共汽车)。
以上就为Mobileye的智能驾驶产品功能序列,总的来说典型先解决好安全风险,逐步拓展场景的方案,从简单的封闭的高速主干道环境,到复杂开放的城市场景。
另外值得关注的是,风险处置的考虑,能进行安全停车,未来的风险处置支持自动行驶到安全地方停车,这是当前L2不论多少个加号都不会太考虑的问题,但要跨过L2也就是真正考虑自主驾驶的时候,智能驾驶系统必须需要考虑依靠自己进行风险处置,而不是甩给驾驶员。
最后,Mobileye还是对传感器的多样性考虑冗余,也是在技术路径发展过程中比较谨慎和不冒进的表现。
智能驾驶,虽然在当前疫情以及地缘政治的影响下产生更多的困难点,但犹如我之前文章表述的,如果从技术方面考虑当前大数据,芯片的发展已经为人工智能在交通领域的应用提供了天时地利人和的机会,一切都在向前发展,慢一点可能是回归理性和稳健,更利于行业的健康长期发展。
参考文章以及图片:
1、Mobileye 2022投资者会议-英特尔
2、Mobileye 2022招股说明书-Mobileye
3、Mobileye RSS安全驾驶策略-Mobileye
4、The Mobileye Story 技术介绍 -Mobileye
5、REM Mapping Revolution 地图介绍 - Mobileye
6、RSS - Mobileye与SFF - Nvidia 介绍 两家安全策略
来源:Vehicle Pirate Jack






